 SCIENCES DE L'INGENIEUR
SCIENCES DE L'INGENIEUR
Niveau : Terminale générale, enseignement de spécialité SI

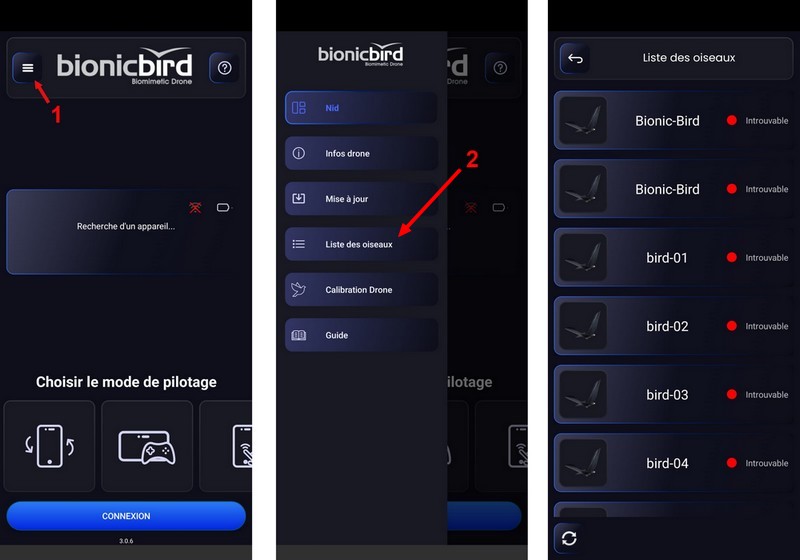
Le Bionic Bird n’est pas un drone comme les autres, ne cherchez pas les hélices, il n’en a simplement pas. En effet, cet appareil s’inspire du battement des ailes des oiseaux pour s’envoler. Cette science s’appelle le biomimétisme, elle consiste, pour faire simple, à observer les phénomènes mécaniques et biologiques de la nature pour trouver des solutions techniques, applicables à des objets de construction humaine. Cette technologie appliquée à un drone permet d’obtenir un engin volant insolite et totalement silencieux. Le drone se pilote à l’aide d’un smartphone et une application dédiée compatible Android et iOS.
Inventé par la start-up française XTIM BIONIC BIRD, Bionic Bird est porté par son créateur, Edwin Van Ruymbeke, le petit fils de l’inventeur de l’oiseau à élastique et son associé Marc Zeller.
Sources neozone.orgL'objectif de ce TP est de vérifier la fréquence des battements des ailes du drone.


Appeler le professeur pour faire valider le fonctionnement du drone.

Relever la fréquence de battement des ailes indiquée dans le diagramme des exigences (figure 1), l'identifiant id="1.1.4.3"
Appeler le professeur pour faire valider votre résultat.
OFF.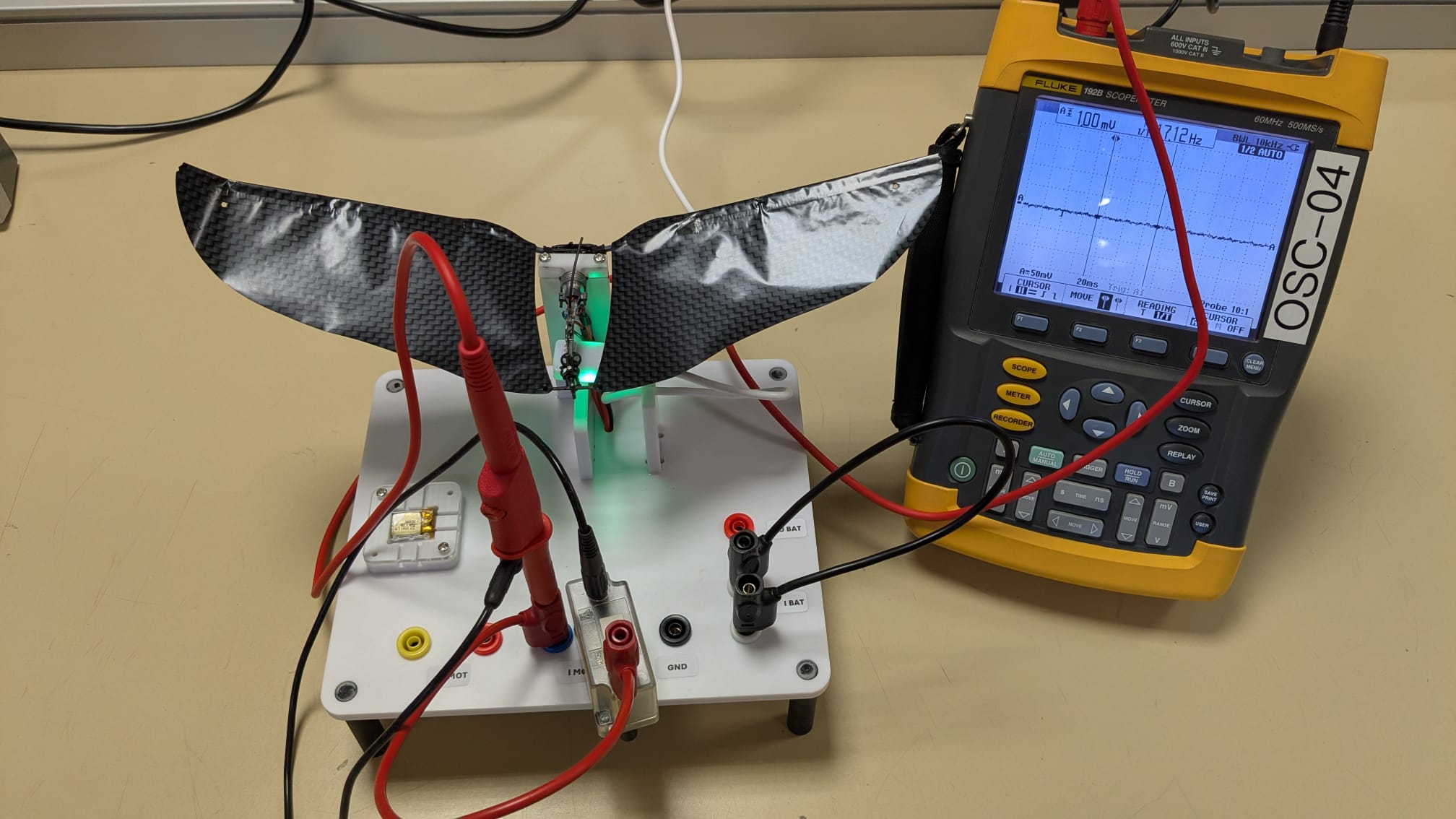
Faire vérifier votre câblage avant de mettre le drone sous tension !
Appeler le professeur pour faire valider votre résultat.
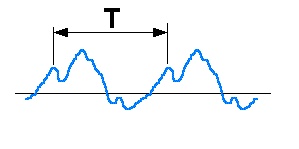
DEFINITION :
La période d’un signal électrique est la durée au bout de laquelle le motif du signal se répète à l’identique.
T= ? Sachant que $F=1/T$
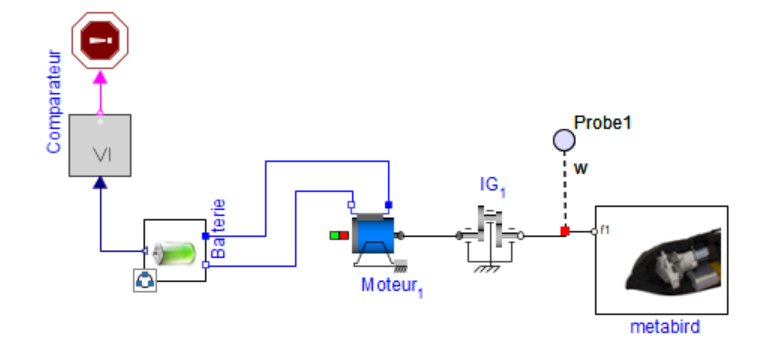

ω = ?
Faire valider votre résultat par le professeur.
Calculer les écarts relatifs
Calcul de l'écart relatif entre la valeur attendue et mesurée : $epsilon1=|"valeur mesurée - valeur attendue"|/"valeur attendue"$ $epsilon1=|?-?|/?
Conclure sur les écarts et la fréquence de battement des ailes du drone.
Faire valider vos résultats par le professeur.
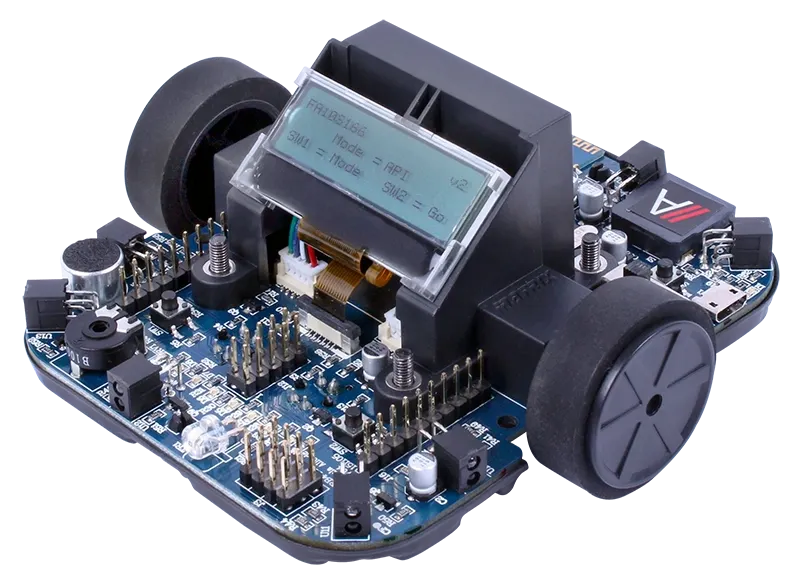
Le Robot Formula Allcode peut se programmer avec de nombreux langages de programmation et notamment en Python
Il possède plusieurs fonctions que vous allez programmer.
Par défaut, la connexion Bluetooth est activée sur vos ordinateurs portables. Si ce n’est pas le cas, vous pouvez l’activer dans le panneau de configuration.
Allumer le robot, son nom Bluetooth apparait en haut à gauche de l’écran du robot.
Cliquez sur l’icône Bluetooth dans la zone de notification puis afficher les périphériques Bluetooth
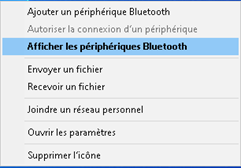
Cliquer sur + (ajouter un appareil Bluetooth …)
Sélectionner votre robot. Eviter d’appairer un autre robot pour ne pas créer des ports COM inutiles.
Le code d’appairage est 1234
Appuyer sur les touches Windows R copier puis coller la ligne de commande suivante :
rundll32.exe shell32.dll,Control_RunDLL bthprops.cpl,,2
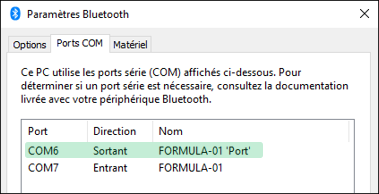
Lorsque le programme python vous demandera de sélectionner le numéro du port, toujours sélectionner le port indiqué « Sortant » de votre robot (ici 6).
Si aucun port sortant n'existe :
Programmer le déplacement du robot pour parcourir le labyrithe.
Contenu
sous
licence CC BY-NC-SA 3.0
Pascal Hassenforder 01/02/2026
Mise à jour du 10/02/2026